library(sf)
bbox <- st_bbox(c(xmin = -122.5129,
ymin = 37.70026,
xmax = -122.3871,
ymax = 37.79975),
crs = st_crs(4326))Библиотека rayvista
В R есть множество совершенно изумительных библиотек с открытым кодом, одна из них – rayshader, которая позволяет делать потрясающие 3D-изображения на основе матрицы высот и различных алгоритмов отмывки теней и трассировки лучей. Помимо создания 3D-картографических моделей, в rayshader можно преобразовывать объекты ggplot2 в красивые трехмерные визуализации данных. Полученные модели можно вращать и исследовать в интерактивном режиме, а движение камеры можно запрограммировать для создания анимации. Подробно работу с rayshader, функции, руководства и результаты работы можно посмотреть на сайте библиотеки, на персональном сайте автора библиотеки Rayverse Blog и в главе Трехмерные модели интерактивной книги Визуализация и анализ географических данных на языке R.
Библиотека rayvista создана как плагин к rayshader и содержит основную функцию plot_3d_vista() для создания 3D-визуализации практически любого местоположения на Земле по географическим координатам. Так были созданы альбомы Горы России и Непокоренные вершины мира. Для создания цифровой модели рельефа местности на основе высот над уровнем моря в rayvista используется библиотека elevatr. Для создания карт, которые накладываются на 3D-основу высот, используется библиотека maptiles, которая позволяет загружать, комбинировать и отображать карты различных провайдеров (по умолчанию это Esri, а также OpenStreetMap, CARTO и Thunderforest).
Полученные модели можно комбинировать с командами rayshader, накладывать объекты OpenStreetMap, и т.д. Установить библиотеку можно с помощью команды
# install.packages("devtools")
devtools::install_github("h-a-graham/rayvista", dependencies=TRUE)При создании модели открывается RGL-окно, например, в macOS необходимо установить XQuartz.
Базовая работа с 3D-моделями
Создадим простейшую 3D-модель. В качестве исходной визуализации выберем модель вершины Амадаблам – вершины в Гималаях, высота главного пика которой равна 6 814 м.
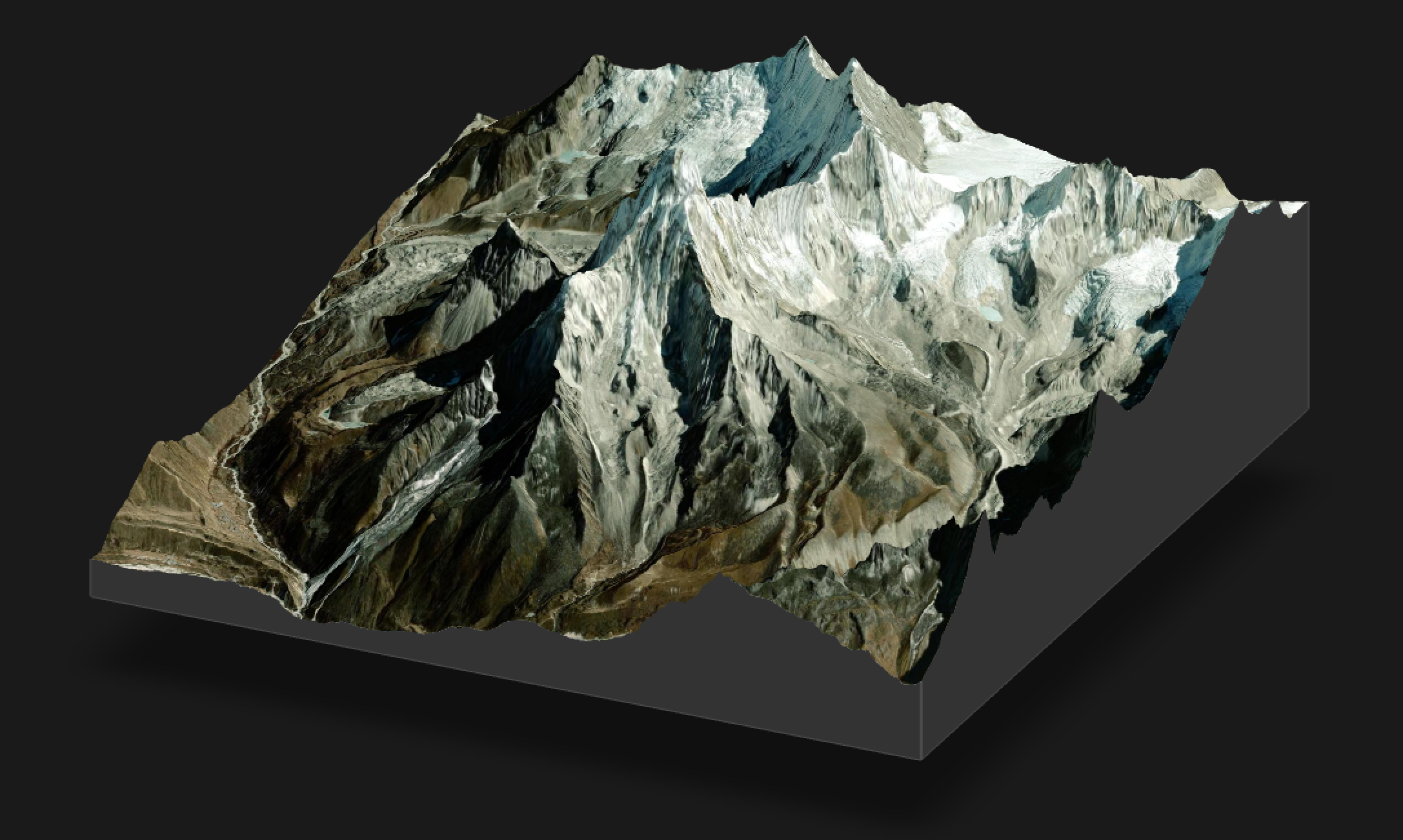
rayvista – вершина Амадаблам
1Amadablam <- plot_3d_vista(lat = 27.8599,
long = 86.8614,
2 zscale = 6,
3 zoom = 0.6,
soliddepth = 4000,
4 radius = 5000,
5 overlay_detail = 14,
6 theta = -65, phi = 25,
7 windowsize = 1200,
background = "grey10")- 1
- широта и долгота, выраженная в WGS84;
- 2
-
при условии, что x = y,
zscaleпоказывает соотношение между x и z (либо y и z), по умолчаниюzscale= 2; - 3
- коэффициент масштабирования, по умолчанию равен 1;
- 4
- радиус, определяющий ограничивающую область;
- 5
-
число между 0 и 20, отвечающее за масштаб в
maptiles::get_tiles(), уровни масштабирования можно посмотреть в OpenStreetMap wiki, по умолчанию значение равно 13; - 6
- угол вращения и азимутальный угол соответственно;
- 7
- положение, ширина и высота устройства RGL, отображающего модель.
В библиотеке rayvista возможно использовать карты-подложки различных провайдеров (например, OpenStreetMap, Esri, CARTO или Thunderforest, также, см. статью по поводу доступности карт Stamen). Все возможные слои показывает команда
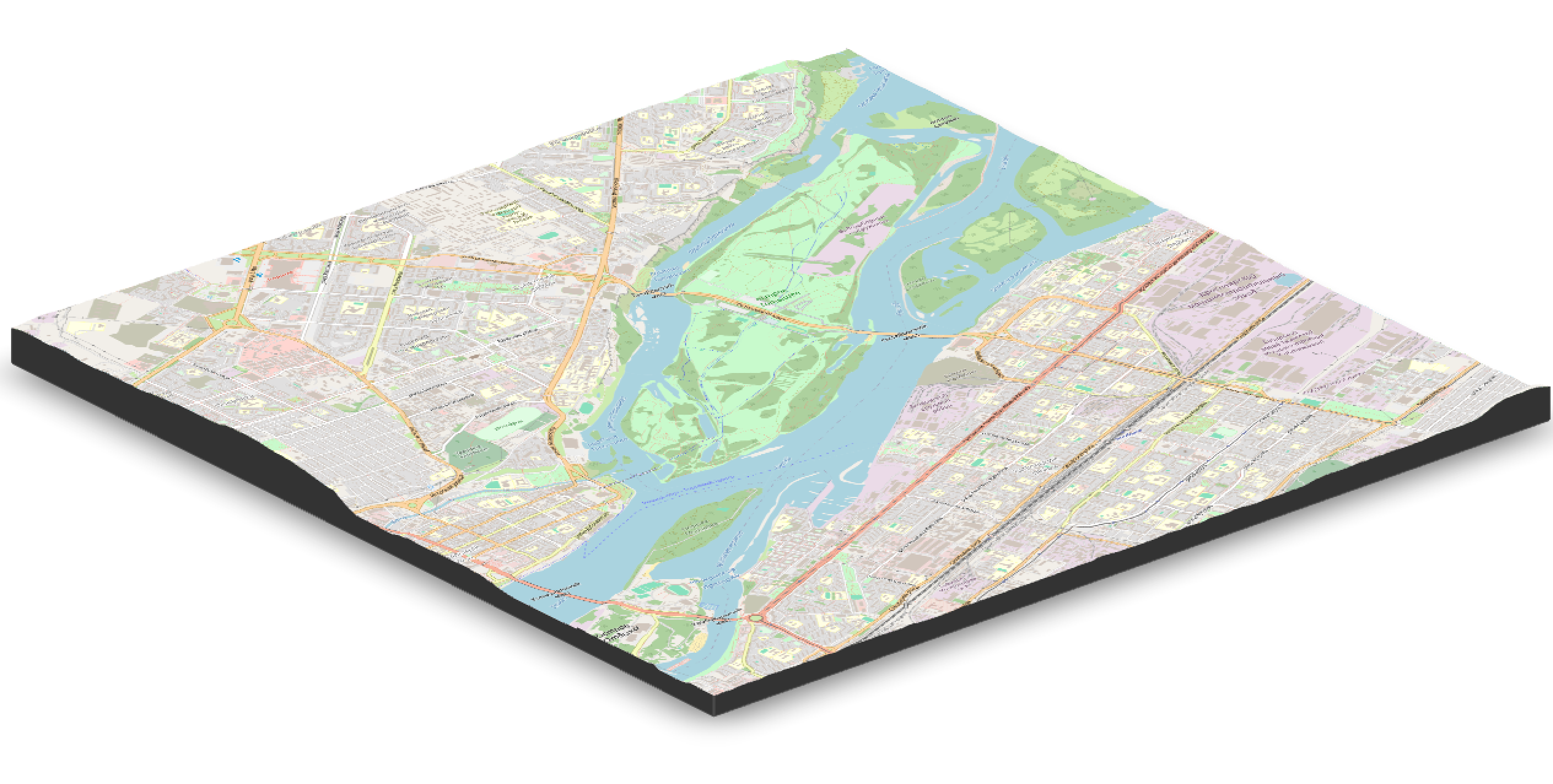
?maptiles::get_tiles В примере ниже покажем различные варианты для визуализации острова Татышев, г. Красноярск.
Krasnoyarsk <- plot_3d_vista(lat = 56.01986,
long = 92.932413,
zscale = 3,
zoom = 0.5,
1 img_provider = "Thunderforest.Landscape",
2 api_key = "your_api_key_value",
overlay_detail = 14,
theta = -40,
phi = 25,
windowsize = 1300,
soliddepth = 50,
3 # outlier_filter = 0.0001,
4 fill_holes = TRUE)- 1
- вид картографической подолжки;
- 2
- значение API-ключа для Thunderforest-карт, можно получить на сайте, для других карт API-ключ не требуется;
- 3
- если в модели появляются артефакты, это значит что возвращаемые данные о рельефе имеют ошибочно низкие значения, тогда нужно выставить значение от 0 до 1, ближе к 0;
- 4
-
заполняет значения
NAполученные в цифровой модели рельефа местности.
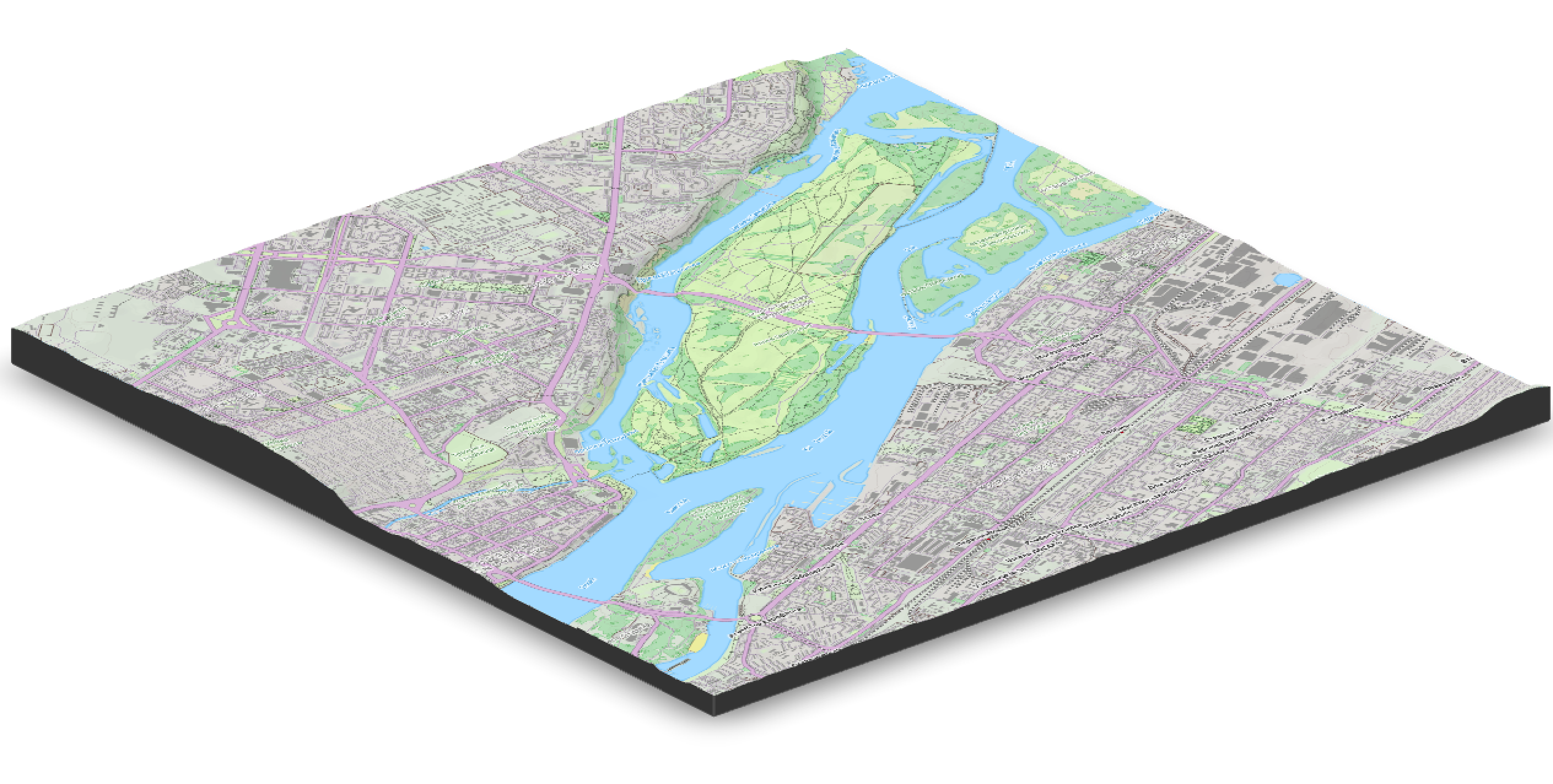
Thunderforest.Landscape, где показаны топографические особенности
Отметим, что если в предыдущем коде, который формирует 3D-изображение, добавить show_vista = FALSE (в команде plot_3d_vista()), то мы не увидим RGL-окно, а сохраним объект, у которого будут атрибуты dem_matrix и texture. Теперь восстановить изображение на рисунке (см. рис. 2) можно так:
Krasnoyarsk$dem_matrix |>
height_shade() %>%
add_overlay(., Krasnoyarsk$texture,
rescale_original = TRUE) %>%
plot_3d(., Krasnoyarsk$dem_matrix, zscale = 3,
windowsize = 1300,
soliddepth = 50,
zoom = 0.5, phi = 25, theta = -40)Сравним предыдущую карту с другими картами-подложками.
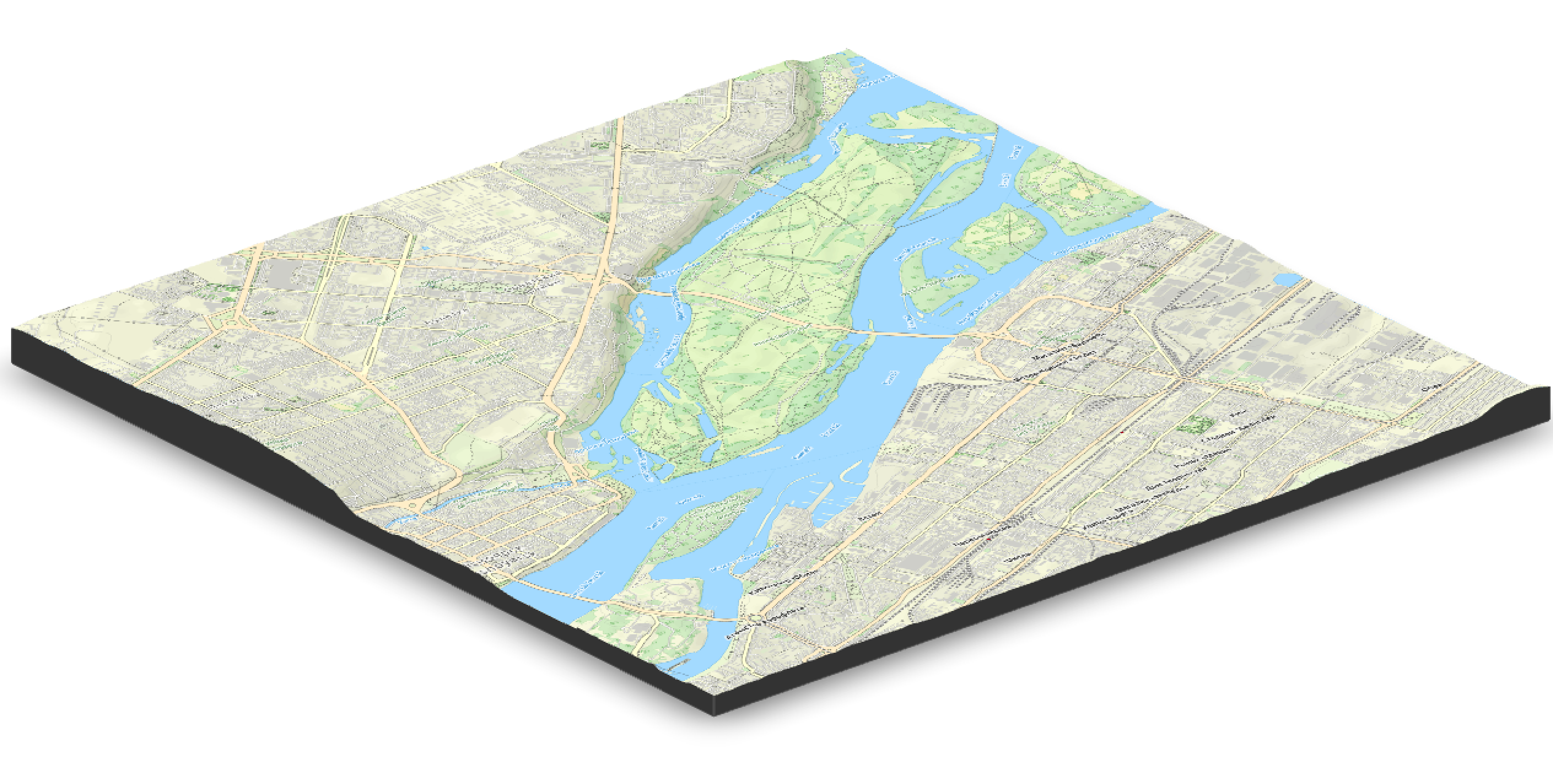
Thunderforest.Outdoors
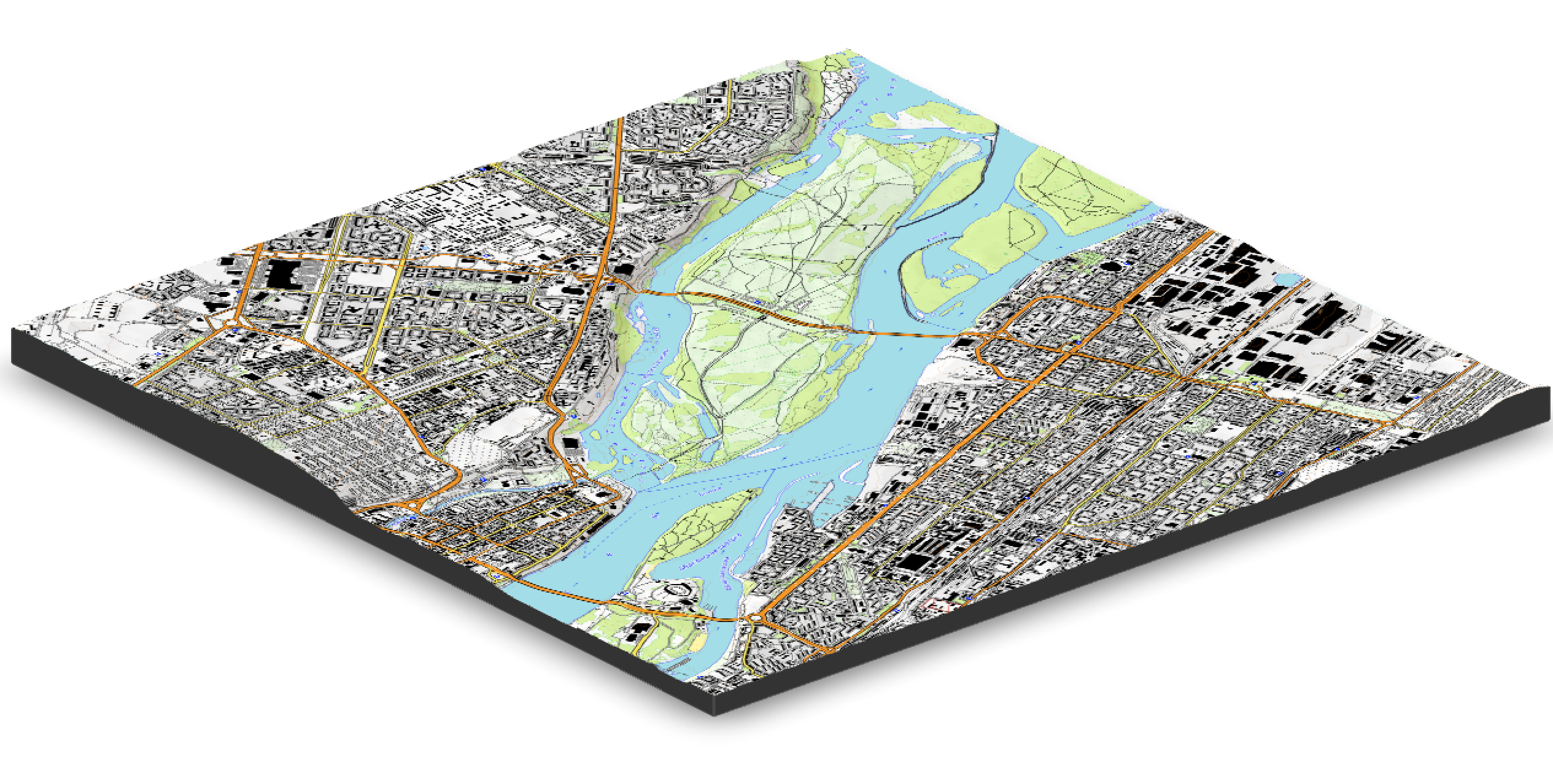
OpenTopoMap
OpenStreetMap
Для лучшего восприятия можно оставить только 3D-поверхность модели, указав solid = FALSE как в следующем примере.
Код
MalySemyachik <- plot_3d_vista(lat = 54.119,
long = 159.656,
zscale = 3,
zoom = 0.6,
radius = 5000,
overlay_detail = 14,
theta = -50,
phi = 30,
windowsize = 1100,
solid = FALSE,
fill_holes = TRUE)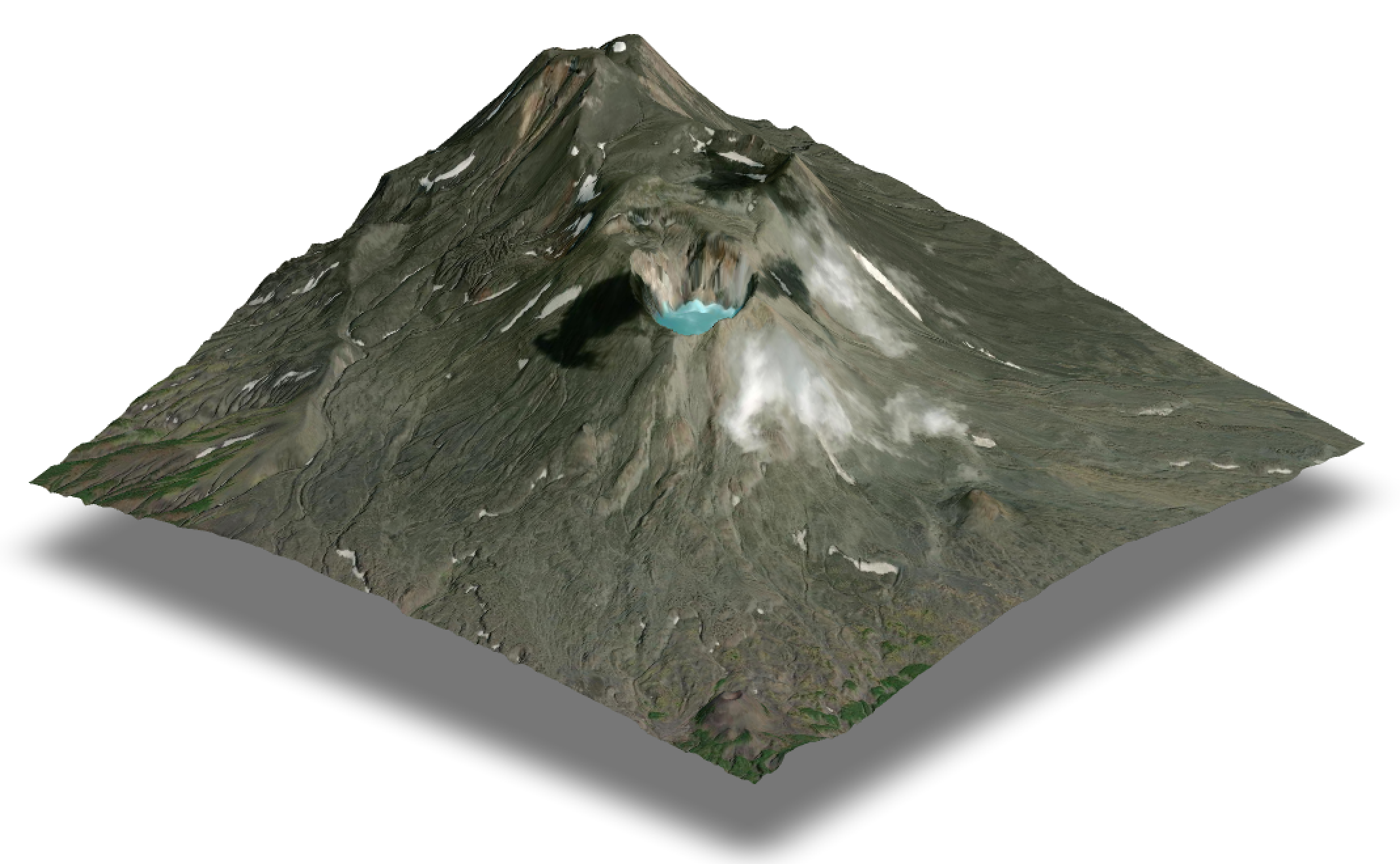
Для имитации эффекта размытия можно использовать функцию render_depth().
Код
HopkinsNZ <- plot_3d_vista(lat = -44.042238,
long = 169.860985,
radius = 5000,
overlay_detail = 14,
elevation_detail = 13,
zscale = 5,
theta = 25, phi=25, zoom = 0.6,
windowsize = 1200,
solid = T,
background = 'white')
render_depth(focus = 0.6, focallength = 15, clear=TRUE)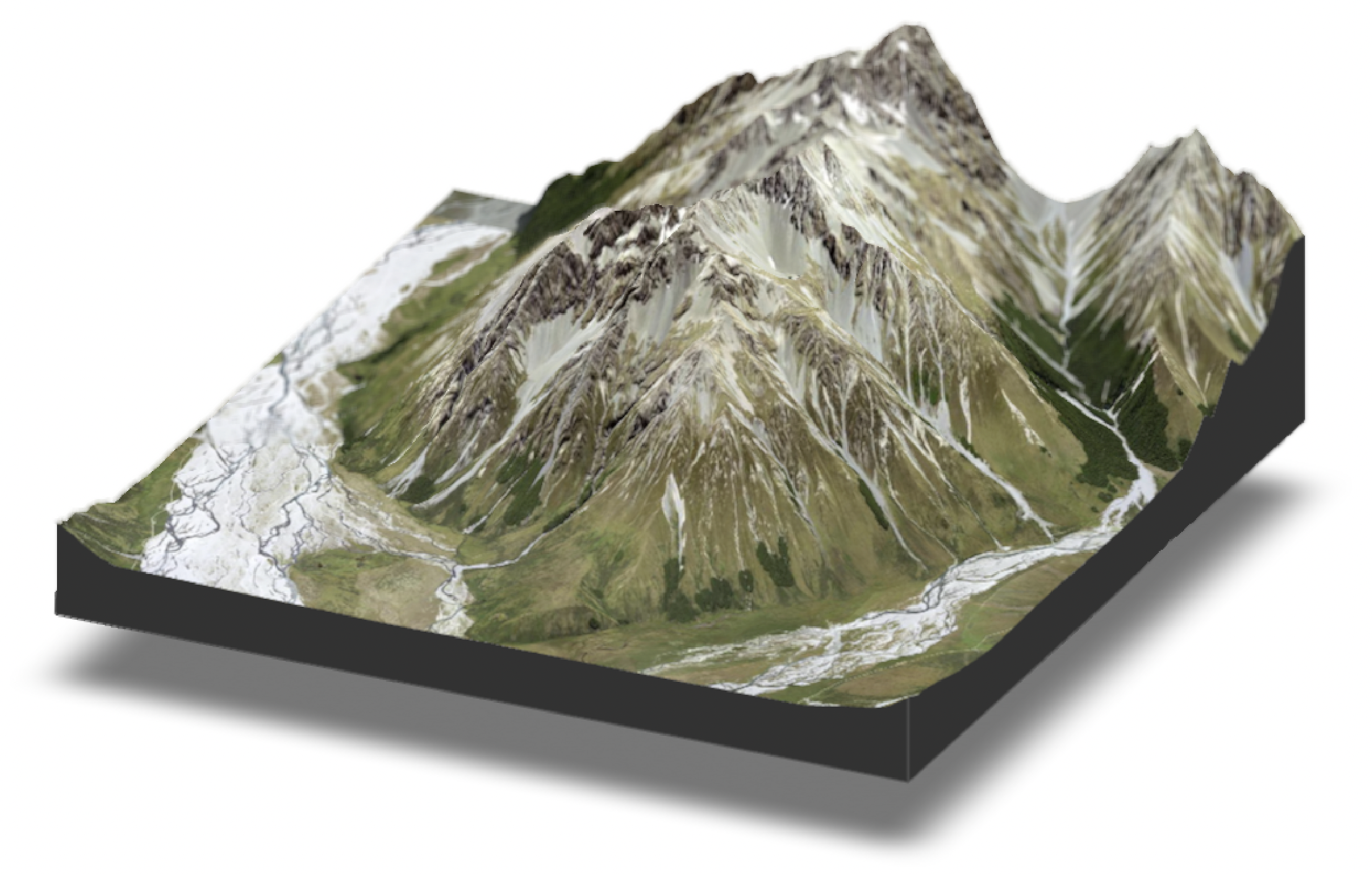
Нанесение дополнительных географических данных на 3D-визуализации
Поднятие плоскости воды
Одна из интересных возможностей, для которой может быть полезна библиотека rayvista – это оценка природных рисков наводнений локальных территорий путем параллельного поднятия плоскости воды. В качестве примера рассмотрим г. Улан-Удэ. Выберем точку внутри города с определенными географическими координатами и найдем оценочную высоту над уровнем моря с помощью сервиса Elevation Finder, в нашем случае это 490 м (в rayshader также существует команда detect_water()). Получим модель местности и поднимем уровень на 20 м до 510 м, чтобы сделать оценку риска затопления.
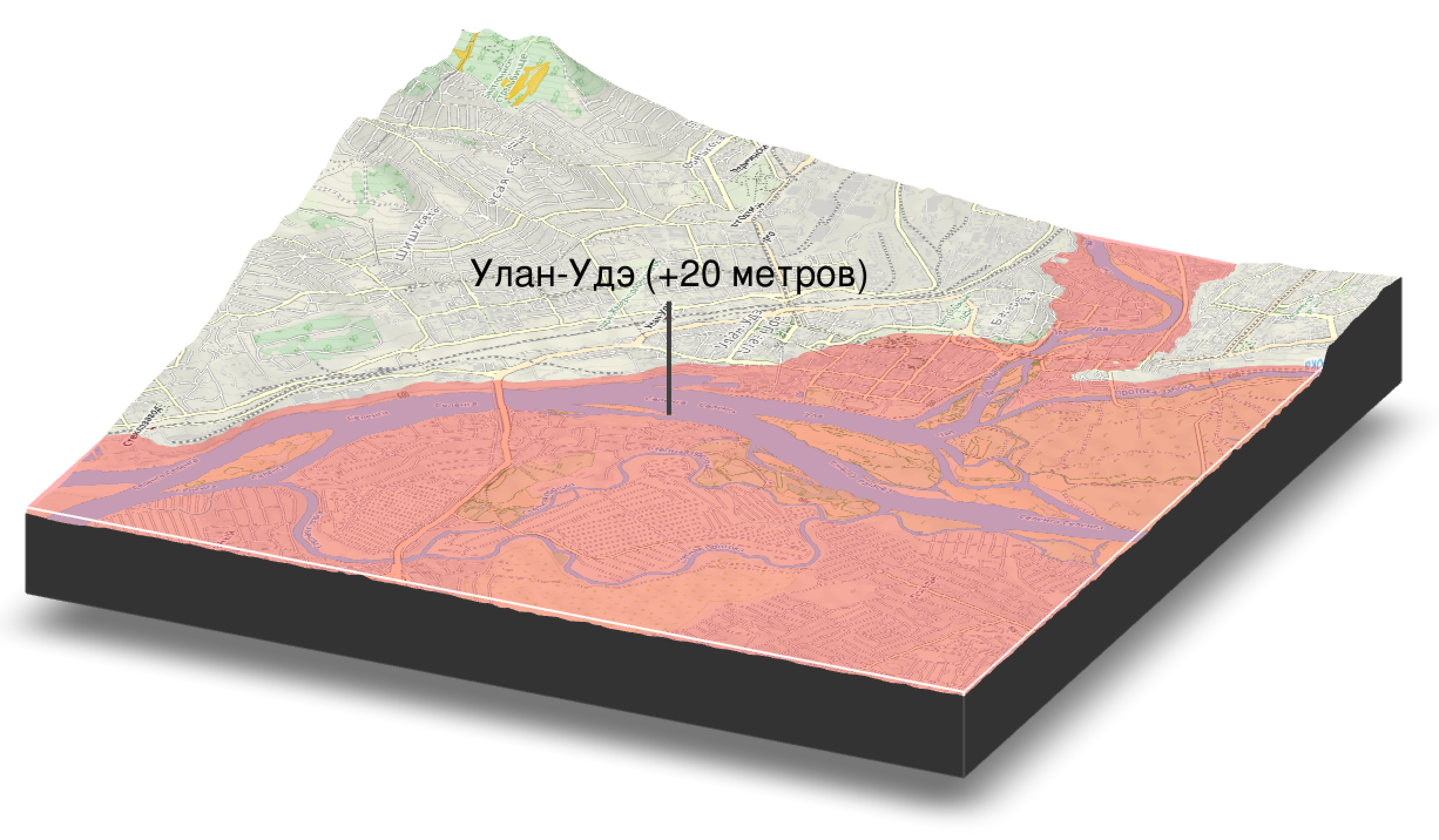
UlanUde <- plot_3d_vista(lat = 51.834,
long = 107.5696,
zscale = 2,
zoom = 0.5,
overlay_detail = 14,
theta = -65,
radius = 5500,
img_provider = "Thunderforest.Outdoors",
api_key = "your_api_key",
windowsize = 1400,
soliddepth = 300,
phi = 25,
1 water = TRUE,
2 waterdepth = 510,
3 wateralpha = 0.3,
4 watercolor = "red",
5 waterlinecolor = "white",
fill_holes = TRUE)- 1
- добавление слоя воды;
- 2
- уровень воды;
- 3
- прозрачность слоя воды;
- 4
- цвет слоя воды;
- 5
- цвет линий по краям слоя воды.
Код ниже добавляет маркеры и метки к текущему 3D-образу.
Код
render_label(heightmap = UlanUde,
lat = 51.824,
long = 107.525,
altitude = 140,
text = "Улан-Удэ (+20 метров)",
extent = attr(UlanUde, 'extent'),
textsize = 1.6, linewidth = 4,
textcolor = "grey20", linecolor = "grey20")Нанеcение данных OpenStreetMap
На 3D-образы можно наносить помимо маркеров, например, растровые данные или данные из OpenStreetMap.
Предостережение
Практически все сервисы стандарта Web Map Tile Service, такие как OSM, Stamen, GoogleMaps и т.д., предоставляют тайлы в системе координат (CRS) EPSG:3857 (WebMercator). Это означает, что если объект нового слоя находится в другой проекции CRS, который не является EPSG:3857 (например, EPSG:4326), необходимо привести наносимый объект (sf или растр) и подложку к единой проекции путем перепроектирования, иначе модель будет будет выглядеть деформированной.
В качестве примера покажем, как сделать дополнительный слой на 3D-модели, который представляет собой данные по дорогам, загруженным из сервиса OpenStreetMap. Выберем Сан-Франциско (Калифорния, США), для которого характерен сложный рельеф местности; по некоторым сведениям в Сан-Франциско насчитывают около пятидесяти возвышенностей.
Загрузим 3D-модель.
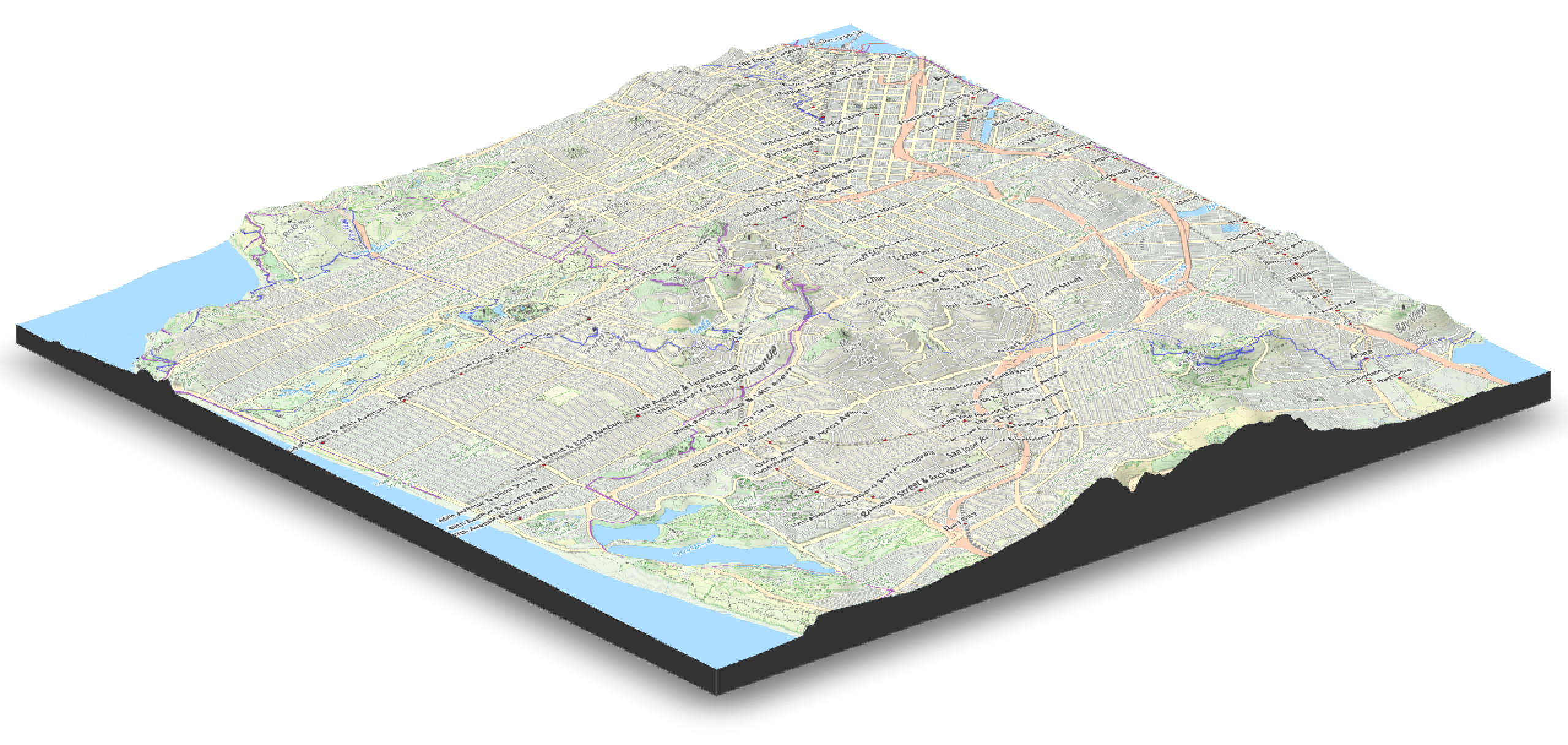
SanFrancisco <- plot_3d_vista(lat = 37.75,
long = -122.45,
zscale = 3,
zoom = 0.5,
img_provider = "Thunderforest.Outdoors",
api_key = "your_api_key",
overlay_detail = 14,
theta = -40,
phi = 25,
windowsize = 1300,
show_vista = FALSE)Определим прямоугольник, ограничивающий область.
Теперь загрузим дорожную сеть из OpenStreetMap.
library(osmdata)
SanFrancisco_highway <- opq(bbox) |>
add_osm_feature("highway") |>
osmdata_sf()Следующий этап – определение новых проекций, без этого график будет искажен.
SanFrancisco_lines =
st_transform(SanFrancisco_highway$osm_lines, 3857)
bbox_transformed = st_bbox(
st_transform(
st_as_sfc(bbox),
3857
)
)
librarary(raster)
extent_zoomed = extent(bbox_transformed)Окончательно:
SanFrancisco$dem_matrix |>
height_shade() %>%
add_overlay(., SanFrancisco$texture,
rescale_original = TRUE) %>%
# дороги
add_overlay(
generate_line_overlay(
SanFrancisco_lines,
extent = extent_zoomed,
linewidth = 1.2, color = "black",
heightmap = SanFrancisco$dem_matrix)) %>%
plot_3d(., SanFrancisco$dem_matrix,
zscale = 3,
windowsize = 1300,
zoom = 0.5, phi = 25, theta = -40)Теперь можно сравнить модель после нанесения дорожной сети на образ.
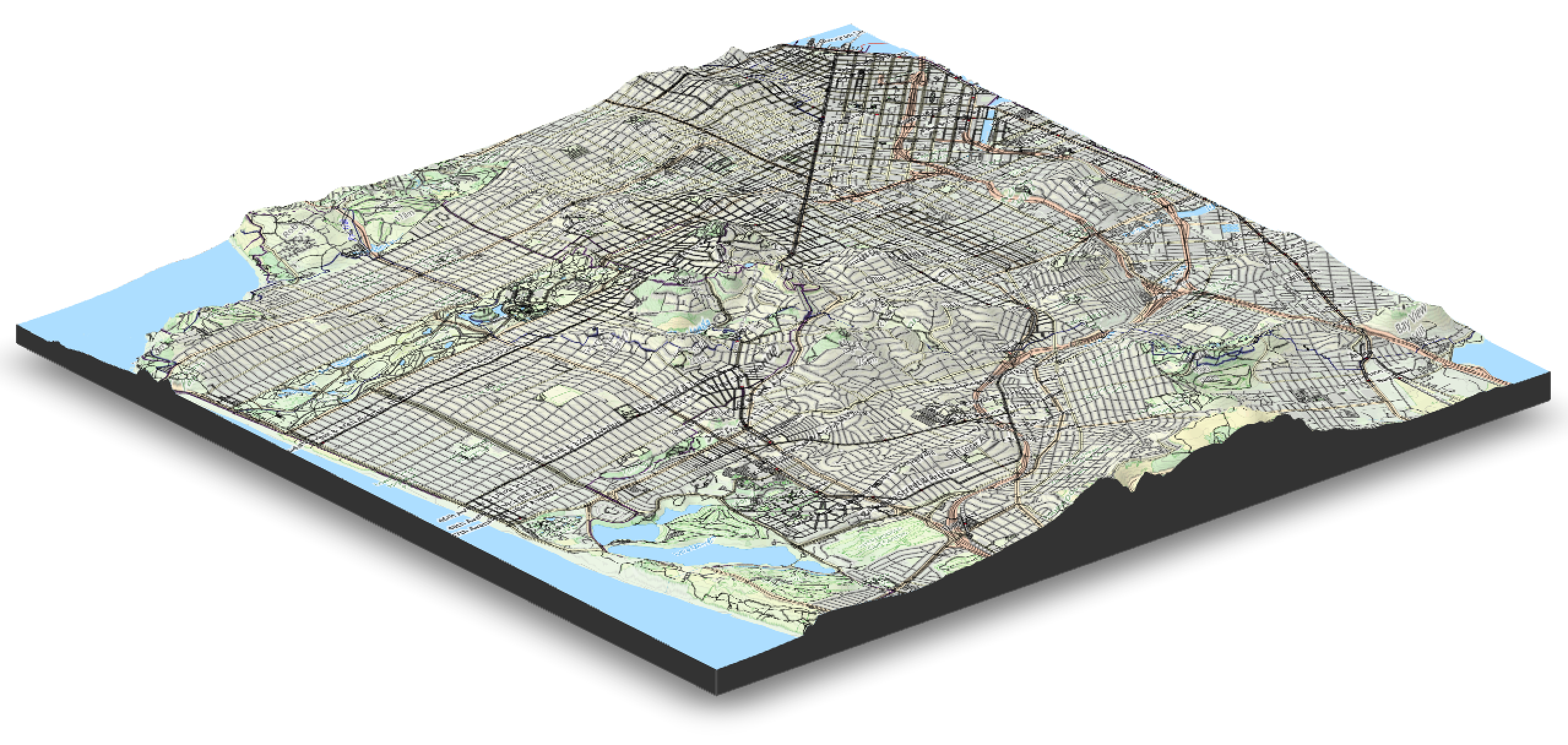
Нанесение дополнительных слоев на 3D-модели
Несомненно, на модели можно накладывать и другие слои с исходными данными или результатами моделирования, что делает технологию весьма привлекательной (см., например, статью Adding Open Street Map Data to Rayshader Maps). Приведем еще один пример, сделаем слой на 3D-модели, показывающий происшествия, на которые отреагировала пожарная служба Сан-Франциско. Отметим, соответствующий набор данных также содержит географические координаты.
data_sf |>
dplyr::select(`Incident Date`, point)# A tibble: 616,630 × 2
`Incident Date` point
<dttm> <chr>
1 2008-04-01 00:00:00 POINT (-122.41837339 37.74208979)
2 2008-04-01 00:00:00 POINT (-122.39489 37.756291)
3 2008-04-01 00:00:00 POINT (-122.407468 37.78008)
4 2008-04-01 00:00:00 POINT (-122.42684908 37.77612642)
5 2008-04-01 00:00:00 POINT (-122.4863941 37.77428492)
6 2008-04-01 00:00:00 POINT (-122.4481912 37.7597267)
7 2008-04-01 00:00:00 POINT (-122.405223 37.788694)
8 2008-04-01 00:00:00 POINT (-122.416457 37.739056)
9 2008-04-01 00:00:00 POINT (-122.392082 37.781846)
10 2008-04-01 00:00:00 POINT (-122.46678342 37.75300898)
# ℹ 616,620 more rowsСделаем небольшую предобработку данных.
library(magrittr)
data_sf$coordinates <-
str_extract(data_sf$point,
"(?<=\\()([^()]*?)(?=\\)[^()]*$)")
data_sf <- data_sf |>
separate_wider_delim(coordinates, " ",
names = c("lon", "lat"))
data_sf$lat %<>% as.numeric()
data_sf$lon %<>% as.numeric()В качестве примера, выделим точки вызовов, отвечающие 2022 году.
points_sf <- data_sf |>
dplyr::select(`Incident Date`, lat, lon) |>
mutate(year = lubridate::year(`Incident Date`)) |>
dplyr::filter(year == 2022) |>
na.omit() |>
st_as_sf(coords = c("lon", "lat"), crs = 4326) %>%
st_transform(., 3857)points_sfSimple feature collection with 33260 features and 2 fields
Geometry type: POINT
Dimension: XY
Bounding box: xmin: -13685560 ymin: 0 xmax: 13627530 ymax: 4555811
Projected CRS: WGS 84 / Pseudo-Mercator
# A tibble: 33,260 × 3
`Incident Date` year geometry
* <dttm> <dbl> <POINT [m]>
1 2022-01-16 00:00:00 2022 (-13625484 4548073)
2 2022-01-16 00:00:00 2022 (-13626605 4547332)
3 2022-01-21 00:00:00 2022 (-13625214 4547874)
4 2022-01-21 00:00:00 2022 (-13629079 4549058)
5 2022-01-23 00:00:00 2022 (-13628711 4551584)
6 2022-01-30 00:00:00 2022 (-13627494 4538682)
7 2022-02-08 00:00:00 2022 (-13625338 4547751)
8 2022-02-08 00:00:00 2022 (-13627882 4549346)
9 2022-02-08 00:00:00 2022 (-13627827 4546331)
10 2022-02-10 00:00:00 2022 (-13627366 4548730)
# ℹ 33,250 more rowsSanFrancisco$dem_matrix |>
height_shade() %>%
add_overlay(., SanFrancisco$texture,
rescale_original = TRUE) %>%
# пожары
add_overlay(
generate_point_overlay(
points_sf, extent = extent_zoomed,
size = 0.8, color = "#C11317",
heightmap = SanFrancisco$dem_matrix)) %>%
plot_3d(., SanFrancisco$dem_matrix,
zscale = 3,
windowsize = 1300,
zoom = 0.5, phi = 25, theta = -40)
Как видно на рисунке (см. рис. 11), наибольшее количество происшествий приходится на деловой центр северо-востока города.
Заключение
Библиотека rayvista позволяет довольно легко формировать 3D-визуализацию для различных мест планеты Земля и, при необходимости, моделировать различные физические процессы, что делает ее весьма перспективным решением. Мы рассмотрели некоторые примеры применения библиотеки, дополнительные возможности и нанесение дополнительной географической информации на слои.
Хорошим руководством по rayvista может также стать видео 3D digital elevation maps with elevatr, rayshader and rayvista in R, в котором Milos Popovic рассказывает этапы создания реалистичных цифровых 3D-карт высот любого местоположения, области или страны в мире с использованием библиотек elevatr, rayshader и rayvista в R.
Session Info
─ Session info ───────────────────────────────────────────────────────────────
setting value
version R version 4.3.2 (2023-10-31)
os macOS Monterey 12.1
system aarch64, darwin20
ui X11
language (EN)
collate ru_RU.UTF-8
ctype ru_RU.UTF-8
tz Asia/Krasnoyarsk
date 2024-03-01
pandoc 2.18 @ /Users/materov/opt/miniconda3/envs/ox/bin/ (via rmarkdown)
quarto 1.4.550
─ Packages ───────────────────────────────────────────────────────────────────
package * version date (UTC) lib source
dplyr * 1.1.4 2023-11-17 [1] CRAN (R 4.3.1)
forcats * 1.0.0 2023-01-29 [1] CRAN (R 4.3.0)
ggplot2 * 3.5.0 2024-02-23 [1] CRAN (R 4.3.1)
lubridate * 1.9.3 2023-09-27 [1] CRAN (R 4.3.1)
magrittr * 2.0.3 2022-03-30 [1] CRAN (R 4.3.0)
purrr * 1.0.2 2023-08-10 [1] CRAN (R 4.3.0)
readr * 2.1.5 2024-01-10 [1] CRAN (R 4.3.1)
sessioninfo * 1.2.2 2021-12-06 [1] CRAN (R 4.3.0)
sf * 1.0-15 2023-12-18 [1] CRAN (R 4.3.1)
stringr * 1.5.1 2023-11-14 [1] CRAN (R 4.3.1)
tibble * 3.2.1 2023-03-20 [1] CRAN (R 4.3.0)
tidyr * 1.3.1 2024-01-24 [1] CRAN (R 4.3.1)
tidyverse * 2.0.0 2023-02-22 [1] CRAN (R 4.3.0)
[1] /Library/Frameworks/R.framework/Versions/4.3-arm64/Resources/library
──────────────────────────────────────────────────────────────────────────────Ссылка для цитирования
BibTeX
@online{матеров2024,
author = {Матеров, Е.Н.},
title = {Визуализация трехмерных моделей земной поверхности},
date = {2024-02-02},
url = {https://www.naukaidannye.netlify.app/blog/posts/2024-02-02-rayvista},
langid = {ru}
}
На публикацию можно сослаться как
Матеров Е.Н. Визуализация трехмерных моделей
земной поверхности [Electronic resource]. 2024. URL: https://www.naukaidannye.netlify.app/blog/posts/2024-02-02-rayvista.